Goal Stack Planning
Apa itu Goal Stack Planning? Bila kita berbicara tentang Goal Stack Planning, kita biasanya menggunakan Block World sebagai acuan. Jadi Goal Stack Planning adalah algoritma yang digunakan untuk menyusun block-block menjadi susunan yang diinginkan.
Dibawah adalah beberapa komponen dari suatu Sistem Planning:
- Gunakanlah aturan yang terbaik berdasarkan informasi heuristik yang ada.
- Gunakanlah aturan yang dipilih untuk mengkomputasi kondisi awal masalah.
- Deteksi ketika solusi telah ditemukan.
- Deteksi ketika menemukan jalan buntu sehingga itu bisa dibiarkan agar sistem dapat beralih ke arah yang lain.
- Deteksi ketika ada solusi yang hampir benar, lalu gunakan teknik spesial sehingga solusi tersebut menjadi benar.
Operator pada Block World:
- UNSTACK(A,B): Mengangkat balok A yang berada diatas balok B. (Syarat: tidak ada balok lain diatas balok A)
- STACK(A,B): Menaruh balok A keatas balok B. (Syarat: tidak ada balok lain diatas balok B)
- PICKUP(A): Mengangkat balok A yang berada diatas meja. (Syarat: tidak ada balok lain diatas balok A)
- PUTDOWN(A): Menaruh balok A keatas meja.
Predikat pada Block World:
- ON(A,B): berarti balok A berada diatas balok B.
- ONTABLE(A): berarti balok A berada diatas meja.
- CLEAR(A): berarti tidak ada balok lain diatas balok A.
- HOLDING(A): berarti tangan sedang memegang balok A.
- ARMEMPTY: berarti tangan sedang tidak memegang balok.
Setidaknya ada 2 metode Goal Stack Planning yaitu:
- Linear
- Non-Linear
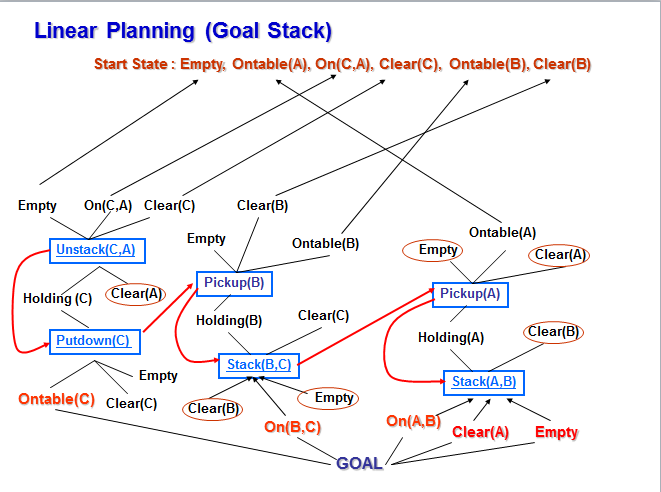
Langkah-langkah Linear:
- Mendefinisikan predikat-predikat pada kondisi akhir dan awal.
- Mulailah membuka predikat-predikat pada kondisi akhir sampai sesuai dengan kondisi awal.
- Hubungkanlah precondition dan postcondition sama.
Contoh Goal Stack Planning Linear:
Kondisi Awal 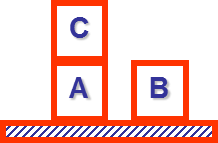 Kondisi Akhir
Kondisi Akhir 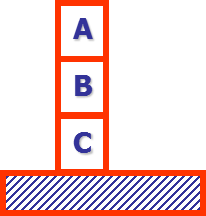
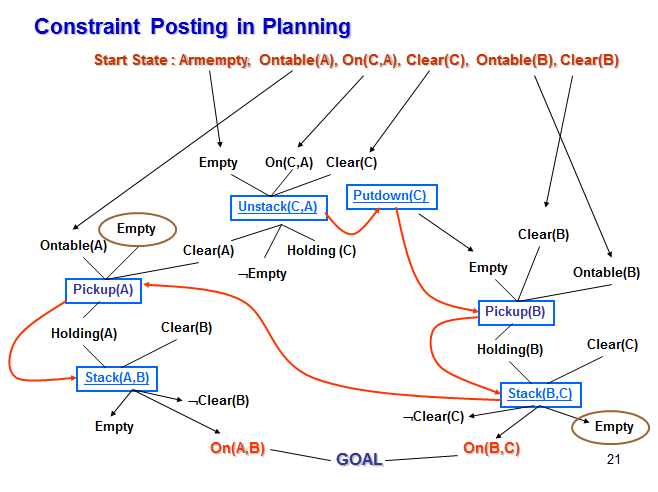
Langkah-langkah Non-Linear:
- Step Addition: Menambah langkah baru.
- Promotion: Membandingkan langkah mana yang harus terlebih dulu dijalankan.
- Declobbering: Menyisipkan langkah baru diantara dua langkah.
- Simple Establishment: Memberikan nilai ke suatu variable untuk memastikan precondition dari beberapa langkah.
- Separation: Mencegah pemberian nilai ke suatu variabel.
Contoh Goal Stack Planning Non-Linear (berdasarkan kondisi diatas):
Sekian dulu untuk Goal Stack Planning kali ini.
Terima kasih sudah meyempatkan waktu untuk membaca ini :D.
www.binus.ac.id